Underwater
Group: UnderWater Robotics
Office: Mechanical Engineering Complex, Building M, Basement
Phone Numbers: +302107723656
Post-Doc Associates: George Karras
PhD students: Shahab Heshmati-alamdari
Research: We address the issue of semi-autonomous ROV(Remotely Operated Vehicle) and AUV(Autonomous Underwater Vehicle) navigation and control. Underwater vehicles operate in complex and uncertain environments partially due to the highly nonlinear hydrodynamics and external disturbances (waves, currents and cable effects). Thus, the development of feedback control schemes, accompanied with online estimation algorithms of the dynamic environment is required for efficient and reliable performance in real-time applications. Current research focuses on AUV’s and how to increase the autonomy of such vehicles so they can operate without human intervention for extended periods of time(48+ hours).Issues related to Sensor Fusion, Localization, Target Tracking in Image Space and Visual Servoing Control Schemes for nonholonomic and holonomic vehicles, are also considered. Real world applications could involve ship hull inspection, waterjet cleaning, seabed mapping,navigation in an unknown environment and underwater manipulation.
Current Projects:
PANDORA
Equipment
Seabotix LBV 150SE

1. 4 degrees of freedom (surge, sway, heave, yaw)
2. 5,5 kgf horizontal thrust
3. 2,2 kgf vertical thrust
4. 2,5 kgf lateral thrust
5. 2 Onboard Cameras: 1 CCD , 1 BW
6. 2 RS-232 Communication Channels
VideoRay Pro

1. 3 degrees of freedom (surge, heave, yaw)
2. 1,7 kgf horizontal thrust
3. 0,2 kgf vertical thrust
4. 1 Onboard CCD Camera
5. 1 RS-232 Communication Channel
Laser Vision System (LVS)
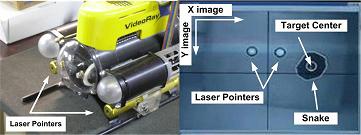
1. LVS consists of the onboard ROV camera and 2 Laser Pointers
2. Use of high-level computer vision algorithms and a laser calibration technique
3. Robust target-tracking and vehicle localization with respect to the center of the detected target
MTi (Xsens Technology B.V.)

1. Miniature gyro-enhanced Inertial Measurement Unit (IMU)
2. Drift-free full 360° 3D orientation (Attitude and Heading)
3. 3D acceleration (full scale of 5g)
4. 3D rate of turn (full scale of 300°/sec)
5. 3D earth-magnetic field data
6. Highly dynamic response, combined with long-term stability