COHORT
Mobile Robotic Manipulators as Human Operator Collaborators
Hellenic Foundation for Research & Innovation (HFRI) – 1st Call for proposals for research projects for the support of faculty members and researchers working in the Greek universities and research centers and the procurement of strategic research equipment, Duration: 01/2020-12/2022, Coordinator: prof. K. J. Kyriakopoulos, School of Mechanical Engineering, NTUA,Greece.
General Idea and Motivation
Although recent developments in robotic technologies have introduced robots in various fields of industry, agriculture, servicing, security, etc., complex applications that require multiple robots to execute a task in physical cooperation with humans call for further investigation to meet challenges and issues related to safety, robustness, and complexity. Towards this direction, the purpose of COHORT is to extend the state of art on human-robot collaboration by developing a cooperative framework between mobile manipulators and a human operator for tasks pertinent to warehouse and logistics applications, manufacturing and servicing. In particular, we envisage two scenarios:
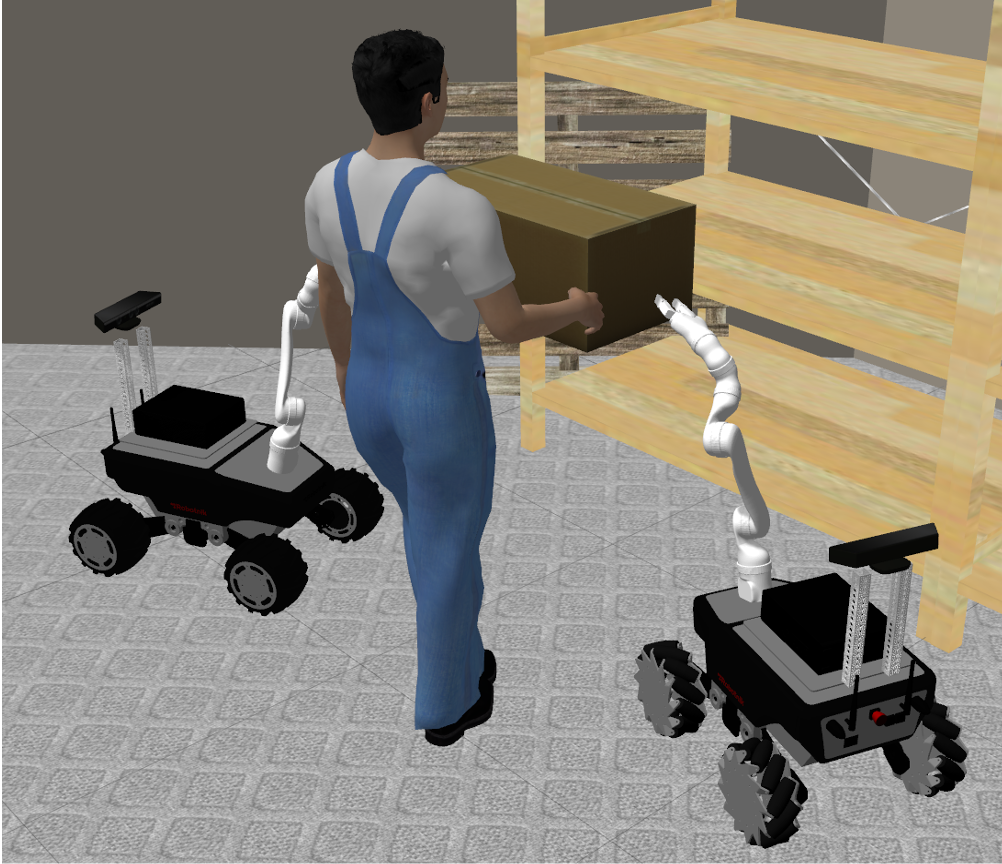
A) load transportation, where a multi-robotic system transports a load following the instructions of a human-operator, expressed by a wrench vector applied on the load while avoiding collisions and satisfying contact constraints and load transportation requirements
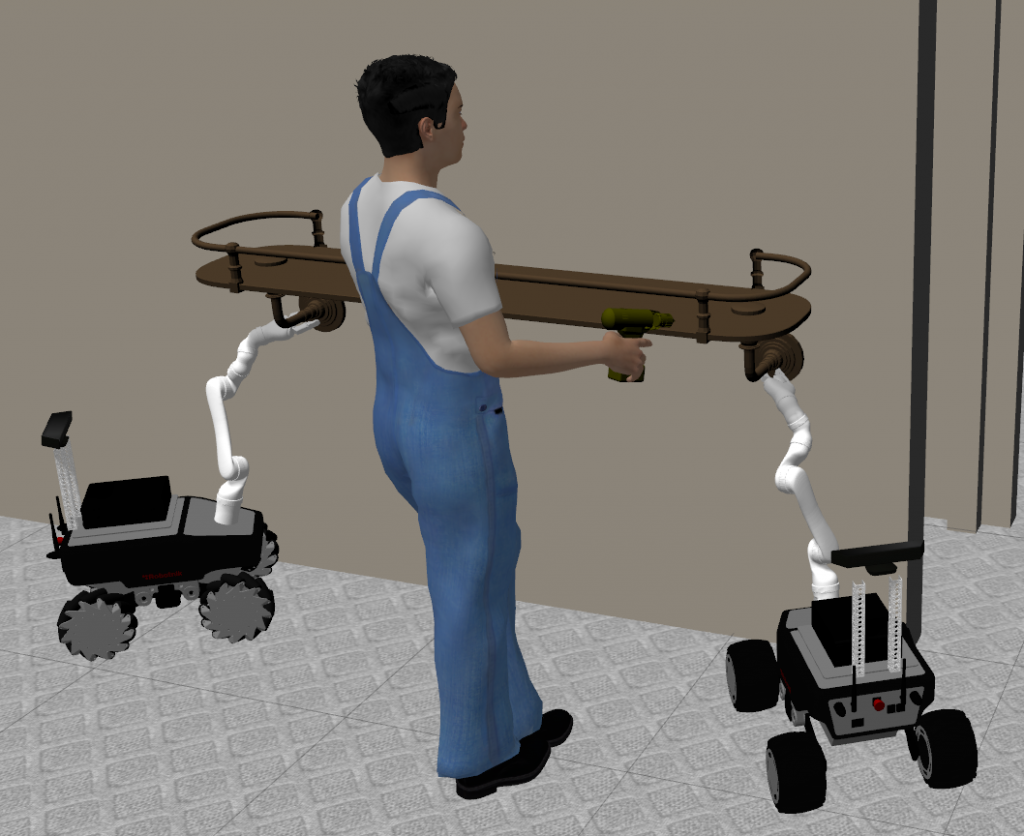
B) object restrain, where a multi-robotic mobile manipulator system holds steadily a load against possible wrench perturbations that are derived by the human-operator.
The envisioned approach will yield a semi-autonomous operation mode, which will pave the way towards efficient human-robot cooperation in various application domains. Specifically, the targeted objectives compared to the existing work indicate that: i) neither transportation nor restrain problems have ever been addressed under the implicit instruction (augmentable manipulation) of a human-operator, ii) automatic collision avoidance and user-imposed reconfiguration within a clattered environment have never been integrated into transportation and restrain control, and iii) the object restrain has only been tackled as a generic disturbance rejection objective, without considering at all the efficient reconfiguration of the robotic team to increase robustness. The aforementioned innovations, as well as their implementation and testing on real robotic platforms, call for new ways of thinking and analysis, which render COHORT a groundbreaking approach in the field of robotics beyond the state of art.
Robots are increasingly used in various tasks of industry, society, medicine, agriculture, security, etc., as assistants or collaborators of people to facilitate, improve and/or speed up specific operations that are currently executed by a group of humans exclusively. Similarly, robotic companions are expected to play a significant role to production, service and domestic environments of tomorrow, where close physical collaboration between human
and robots is expected to be prevailing in a paradigm where an expert human user could perform a complex task while the robotic systems would act as “intelligent assistants”. Manufacturing (assembly), agriculture (crop harvesting), civil (restoring of sewage, pipelines, water pollution prevention), logistics and transport (transportation of bulky objects in a warehouse) require robots as assistants or collaborators to facilitate, improve and/or speed up specific operations currently executed only by humans. In particular, Wheeled Mobile
Manipulators (WMM) are examples of robots that can “join forces” towards effective and rapid task completion. Although the prospects of Artificial Intelligence (AI) are quite optimistic and lots of efforts and resources are invested towards this direction, lots remain to be accomplished before AI can act in realistic environments as a decision-maker for actuation (in addition to perception), where physical interaction of intelligent machines with the environment is central and proximity to human, due to safety concerns, is of paramount importance.
Even with AI, safe interaction among multiple WMM or a human operator and a group of WMM will be inevitable, e.g.
• A group of WMM physically guided by a human could be used as assistants to collaboratively transport bulky objects, in construction (e.g. plasterboard) or assembly tasks of multiple parts.
• In a manufacturing facility, large objects could be held and restrained for screwing or drilling.
Thus, irrespectively of the availability of “Intelligent Robotics”, safe interaction both among multiple robots or between a human operator and a group of robots will be inevitable in the near future and even more challenging when interacting with the physical environment is considered. For example, a group of robots guided by a human could be used to collaboratively transport bulky objects, acting as assistants for either construction (e.g. plasterboard) or assembly tasks of multiple parts (e.g. wooden plank). Similarly, in a manufacturing facility, large objects could be transported along various stages of the assembly line under the guidance of a human and possibly restrained for screwing or drilling. Therefore, such tasks that call for the seamless cooperation between a human operator and a group of assisting robots have recently made the physical human-robot interaction an indispensable research topic in robotics and necessitate for motion control architectures that are both compliant enough during interaction and efficient to avoid collisions. Towards this direction, the vision of COHORT is to address the “robotic equivalent” of smooth human collaboration, within sizeable teams composed of multiple moving base manipulators and a human user, by trying to minimize Information Technology (IT) resources such as computation and communication.
Main goals and Objectives
We consider scenarios involving multiple wheeled mobile manipulators (i.e. manipulators on top of wheeled “holonomic” or “nonholonomic” platforms) and a single human-user. We propose the investigation of the motion control problems associated with such a group of mobile manipulators when assisting the human in two types of tasks that are critical for the described operational framework:
A. Load Transportation – Beyond Teleoperation: We envision a multi-robotic system transporting a load by following the instruction of a human operator expressed in the form his/her wrench vector 2 applied at some user-selected point on the load, while the multi-mobile manipulator system avoids collisions with the surrounding environment and respects contact constraints (e.g. motion while in contact to a wall) without violating any load transportation requirements set by the user. If this is not possible for a specific mobile manipulator, the user can intervene by reconfiguring the system in a fully compliant mode.
B. Object Restrain – Beyond Holding: We envision a multi-robotic mobile manipulator system holding steadily a load against possible wrench perturbations that are applied by a human as a part of operations (e.g. drilling a hole, assembly, etc.). Regarding random wrench perturbations, a disturbance rejection control mechanism will compensate for them. Furthermore, if the direction of a wrench perturbation is known beforehand (e.g. when drilling a hole) then the system could kinematically reconfigure itself to benefit from a better pose.
In order to successfully realize the described tasks. the envisioned control system should address the following objectives:
- Coordination between human and multiple mobile manipulators via physical interaction.
- Coordination under environmental physical interaction constraints.
- Automated obstacle avoidance of the coordinating mobile manipulator system.
- Human-user controlled reconfiguration.
- Disturbance rejection for object restrain.
- Object restrain by system reconfiguration.
Scientific Output
1. Alevizos, K.I., Bechlioulis, C.P. and Kyriakopoulos, K.J., “Physical Human-Robot Cooperation Based on Robust Motion Intention Estimation”, Robotica, vol. 38, no. 10, pp. 1842-1866, 2020.
2. Logothetis, M., Karras, G.C., Alevizos, K. and Kyriakopoulos, K.J., “A variable impedance control strategy for object manipulation considering non-rigid grasp”, in Proc. of IEEE International Conference on Intelligent Robots and Systems, pp. 7411-7416, 2020.
3. Logothetis, M., Bechlioulis, C.P. and Kyriakopoulos, K.J., “Decentralized Impedance Control of Mobile Robotic Manipulators for Collaborative Object Handling with a Human Operator”, in Proc. of Mediterranean Conference on Control and Automation, pp. 741-746, 2021.
4. Alevizos, K.I., Bechlioulis, C.P. and Kyriakopoulos, K.J., “Bounded Energy Collisions in Human-Robot Cooperative Transportation”, IEEE/ASME Transactions on Mechatronics, under review, 2021.