Office
Mechanical Engineering Complex, Building M, Ground Floor
Phone
+30-210-772-1726
Research Area
The Aircraft group investigates issues related to Unmanned Aerial Vehicles (UAVs), a scientific platform deployed widely for GIS, agricultural, search & rescue, meteorological and general research purposes.
Mechanical Engineering Complex, Building M, Ground Floor
+30-210-772-1726
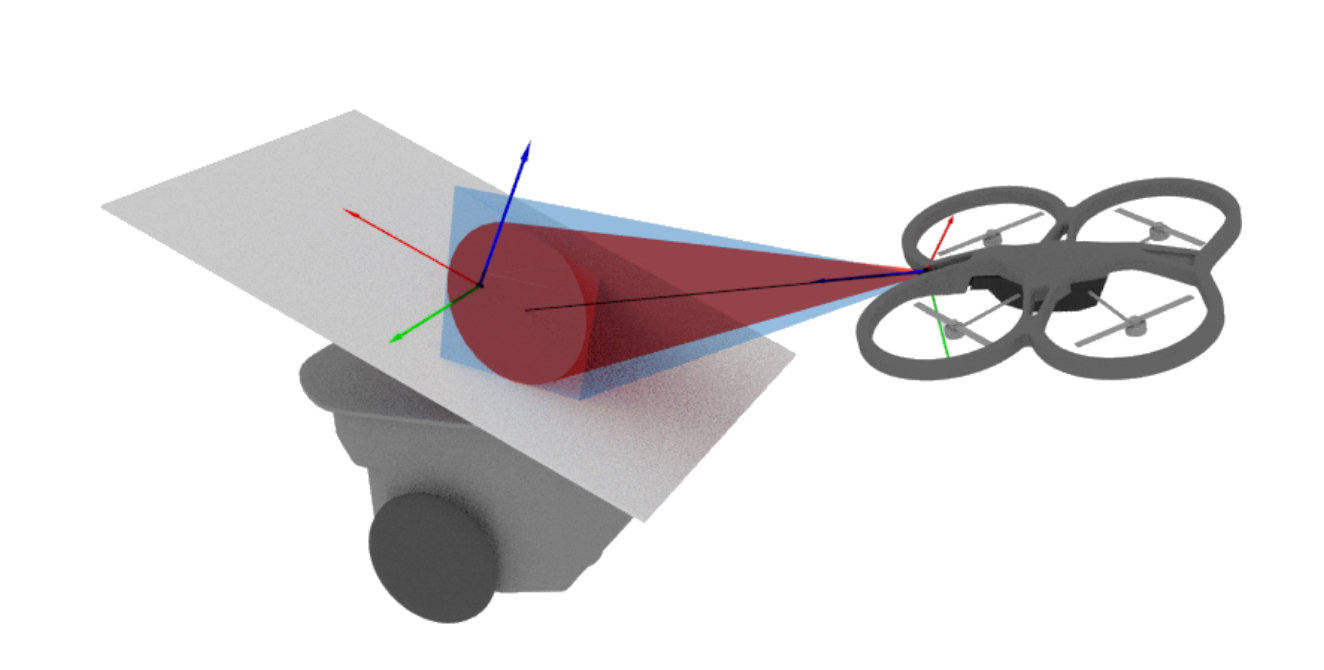
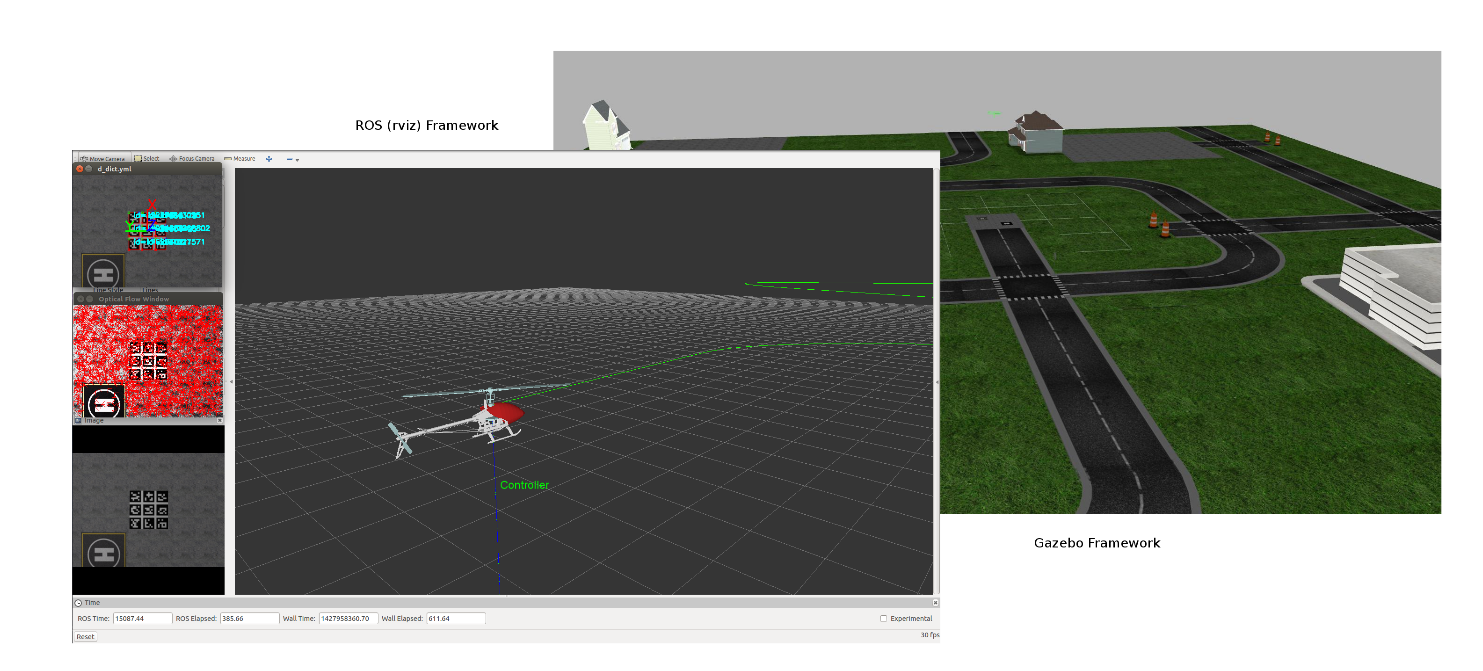
Multi-rotor trajectory planning, quadrotor landing on moving targets, hexarotor dynamic grasping, helicopter control with sensor fusion, and the LUCAS 7-rotor holonomic aerial vehicle.


Fault-detection methodologies using structural analysis and estimation techniques for autonomous UAV safety.
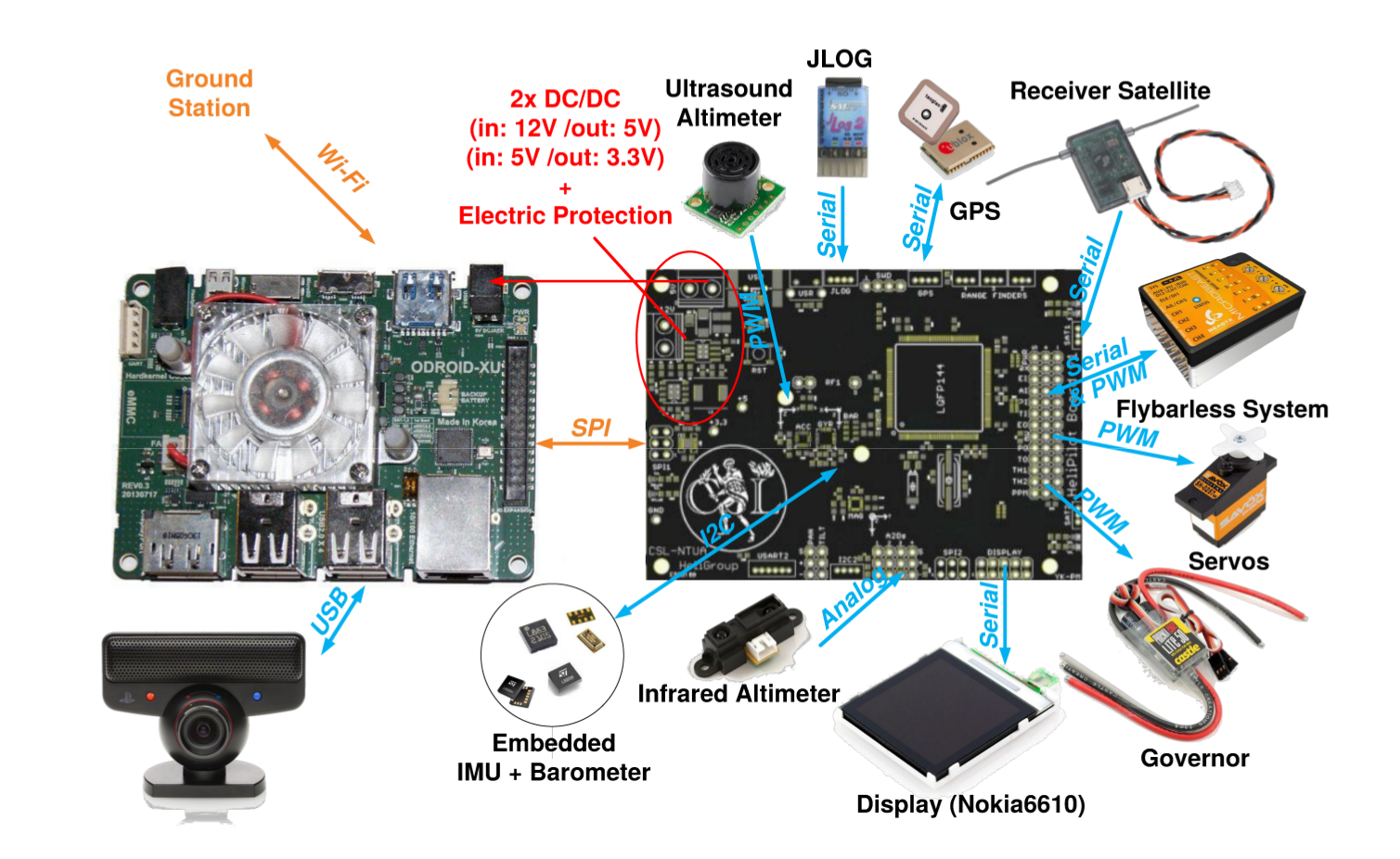
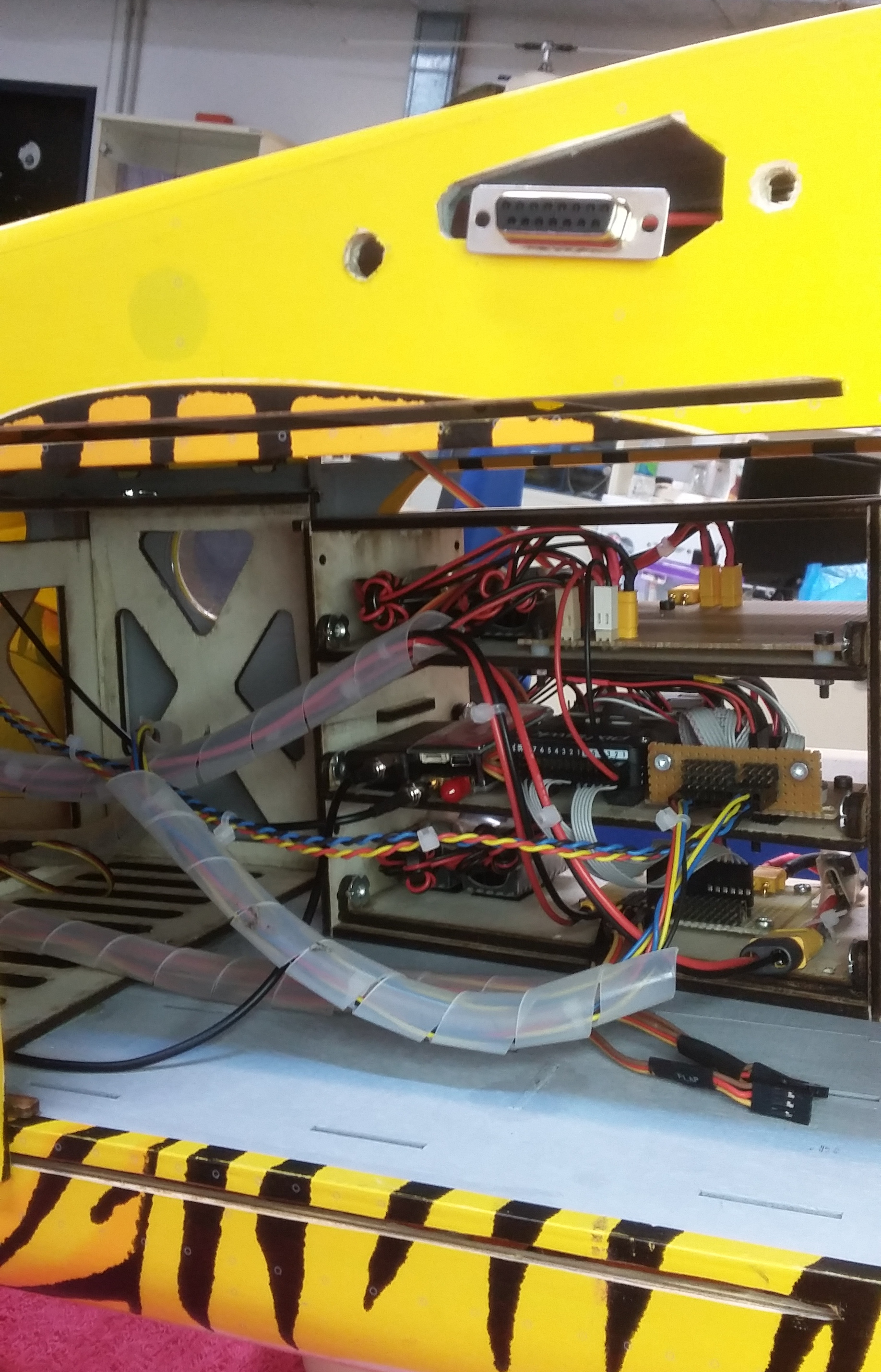
Custom autonomous helicopter and airplane UAVs (Porter and Tiger models) together with proprietary control electronics.